Compare commits
7 Commits
v0.0.5
...
fa1c728187
| Author | SHA1 | Date | |
|---|---|---|---|
|
|
fa1c728187 | ||
|
|
e22e6e8ab3 | ||
|
|
7c979dbd01 | ||
|
|
1c1eddc872 | ||
|
|
3232c7e5c4 | ||
|
|
b4774d4b77 | ||
|
|
54b89e7cb1 |
@@ -5,16 +5,16 @@
|
|||||||
|
|
||||||
Übertragung der IAS des Segelflugzeuges an die Winde
|
Übertragung der IAS des Segelflugzeuges an die Winde
|
||||||
|
|
||||||
Hardware:
|
### Hardware:
|
||||||
- [Heltec LoRa 32 (V3)](https://heltec.org/project/wifi-lora-32-v3/)
|
- [Heltec LoRa 32 (V3)](https://heltec.org/project/wifi-lora-32-v3/)
|
||||||
- SG90 Servo
|
- SG90 Servo
|
||||||
- MS4525 differenz Drucksensor
|
- MS4525 differenz Drucksensor
|
||||||
- 12 LED Ring WS2812b
|
- 12 LED Ring WS2812b 50mm
|
||||||
- BMP180 Temperatur und Luftdrucksensor
|
- BMP180 Temperatur und Luftdrucksensor
|
||||||
- DC-DC Step Down Wandler 3A MP1584
|
- DC-DC Step Down Wandler 3A MP1584
|
||||||
- Relais
|
- Relais
|
||||||
|
|
||||||
Features:
|
### Features:
|
||||||
- [x] LORA zum Übertragen
|
- [x] LORA zum Übertragen
|
||||||
- [x] Airspeed via differenz Drucksensor
|
- [x] Airspeed via differenz Drucksensor
|
||||||
- [ ] Webinterface
|
- [ ] Webinterface
|
||||||
@@ -26,3 +26,74 @@ Features:
|
|||||||
- [ ] Übertragungszeit einstellbar
|
- [ ] Übertragungszeit einstellbar
|
||||||
- [ ] Übertragung Rundumleuchten Signal an Start
|
- [ ] Übertragung Rundumleuchten Signal an Start
|
||||||
- [x] Luftdrucksensor für Höhe und Vario
|
- [x] Luftdrucksensor für Höhe und Vario
|
||||||
|
|
||||||
|
## Aufbau
|
||||||
|
|
||||||
|
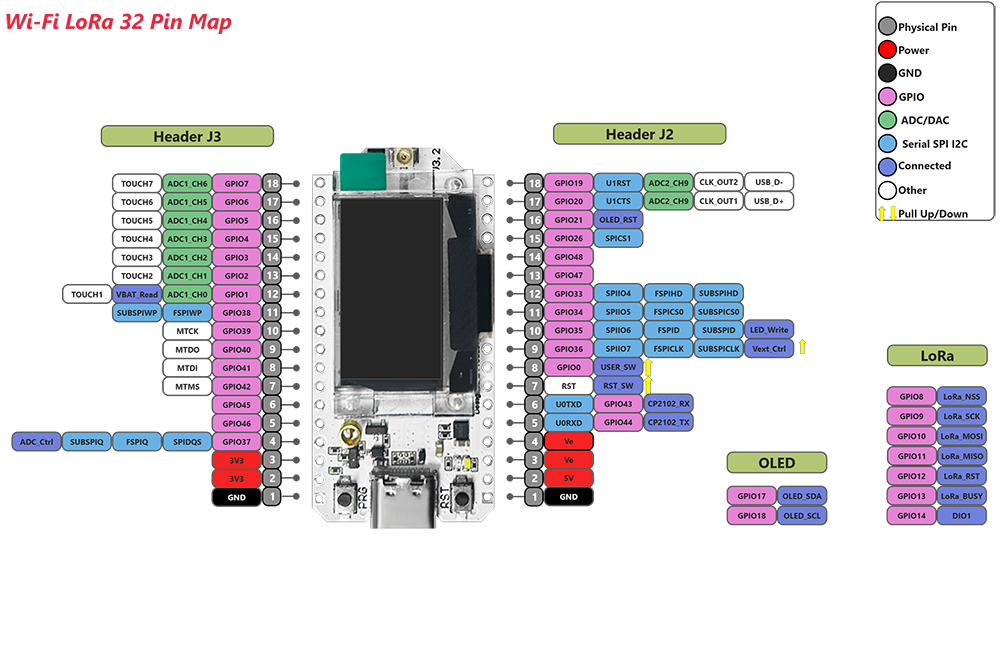
Pin Layout Heltec WiFi LoRa (v3)
|
||||||
|
|
||||||
|
|
||||||
|
|
||||||
|
|
||||||
|
### Anschlusszuordnung
|
||||||
|
| Heltec WiFi LoRa (v3) Pin | MP1584 |SG90 Pin | BMP180 Pin | MS4525 Pin | LED Ring Pin |
|
||||||
|
| --- | --- | --- | --- | --- | --- |
|
||||||
|
| GND | OUT -| GND | GND | GND | GND |
|
||||||
|
| 3.3 V| | | VCC | VCC | VCC |
|
||||||
|
| GPIO 6| | | | | IN |
|
||||||
|
| GPIO 7| | 1 PWM (Orange)| | |
|
||||||
|
| GPIO19| | | SDA| SDA |
|
||||||
|
| GPIO20| | | SCL| SCL|
|
||||||
|
| 5V | OUT + | VCC | | |
|
||||||
|
|
||||||
|
|
||||||
|
|
||||||
|
## PCB
|
||||||
|
Die Platine ist so gestaltet das sie Induvidul bestückt werden kann, je nach Verwendung
|
||||||
|
|
||||||
|

|
||||||
|
|
||||||
|

|
||||||
|
|
||||||
|
[Schaltplan](img/Winden_Telemetry_Schematic.pdf)
|
||||||
|
|
||||||
|
| Bauteil | Modul Segelflugzeug | Modul Winde | Modul SKP |
|
||||||
|
| --- |--- |--- |--- |
|
||||||
|
| J1 | x | x | x | optional|
|
||||||
|
| A1 | x | x | x | optional|
|
||||||
|
| I2C_1 | MS4525 | optional| optional|
|
||||||
|
| I2C_2 | BMP180 | optional| optional|
|
||||||
|
| I2C_3 | optional| optional| optional|
|
||||||
|
| I2C_4 | optional| optional| optional|
|
||||||
|
| GPIO3 | optional| optional| optional|
|
||||||
|
| GPIO4 | optional| optional| optional|
|
||||||
|
| GPIO5 | optional| Eingang Warnleuchte |optional|
|
||||||
|
| GPIO6 | optional| LED Ring | optional|
|
||||||
|
| GPIO7 | optional| Servo | für Relais|
|
||||||
|
|
||||||
|
|
||||||
|
|
||||||
|
## Programmablauf Segelflugzeug
|
||||||
|
|
||||||
|
```mermaid
|
||||||
|
flowchart TD
|
||||||
|
A(["Start"])
|
||||||
|
A --> B{"ist Senden an?"}
|
||||||
|
B --> | Ja | C{"Sende Timer <90 sec"}
|
||||||
|
B --> | Nein | E{"low speed timer <90 sec"}
|
||||||
|
|
||||||
|
C --> | Nein | F["Sende Schleppen komplett"] -->G["Starte Low Speed Timer"]
|
||||||
|
C --> | Ja | D["Sende Speed"]
|
||||||
|
|
||||||
|
|
||||||
|
D --> Z["Warte 1 Sekunde"]
|
||||||
|
G ----> H["Senden aus"] -->Z
|
||||||
|
|
||||||
|
Z --> B
|
||||||
|
|
||||||
|
E --> | nein | I{"Speed < 30 km/h"}
|
||||||
|
I --> | nein |J["Senden an"] --> D
|
||||||
|
I --> | ja|Z
|
||||||
|
E --> | ja|Z
|
||||||
|
|
||||||
|
|
||||||
|
```
|
||||||
@@ -0,0 +1,10 @@
|
|||||||
|
# Tacho mit LED Ring
|
||||||
|
|
||||||
|
Das Grundmodell ist von [alvaroalea auf Thingiverse](https://www.thingiverse.com/thing:2489322)
|
||||||
|
|
||||||
|
|
||||||
|
Erweitert wurde:
|
||||||
|
- Ziffernblatt 0 - 220 km/h
|
||||||
|
- Rückplatte mit Auslass für die Kabel des LED Rings [hier](back_with_hole.stl)
|
||||||
|
- Platte mit Vertiefung für LED Ring [hier](bezel_LED_Tacho.stl)
|
||||||
|
|
||||||
{kind=link}
Binary file not shown.
|
After Width: | Height: | Size: 25 KiB |
Binary file not shown.
Binary file not shown.
{kind=link}
Binary file not shown.
|
After Width: | Height: | Size: 485 KiB |
{kind=link}
Binary file not shown.
|
After Width: | Height: | Size: 130 KiB |
{kind=link}
Binary file not shown.
|
After Width: | Height: | Size: 138 KiB |
Binary file not shown.
+14
-13
@@ -9,8 +9,8 @@
|
|||||||
; https://docs.platformio.org/page/projectconf.html
|
; https://docs.platformio.org/page/projectconf.html
|
||||||
|
|
||||||
[platformio]
|
[platformio]
|
||||||
build_cache_dir=./.pio/.build_cache
|
build_cache_dir = ./.pio/.build_cache
|
||||||
cache_dir=./.pio/.cache_dir
|
cache_dir = ./.pio/.cache_dir
|
||||||
|
|
||||||
[common]
|
[common]
|
||||||
platform = espressif32
|
platform = espressif32
|
||||||
@@ -28,34 +28,35 @@ build_flags =
|
|||||||
lib_deps =
|
lib_deps =
|
||||||
olikraus/U8g2@^2.36.15
|
olikraus/U8g2@^2.36.15
|
||||||
jgromes/RadioLib@^7.4.0
|
jgromes/RadioLib@^7.4.0
|
||||||
|
bblanchon/ArduinoJson@^7.4.2
|
||||||
monitor_speed = 115200
|
monitor_speed = 115200
|
||||||
extra_scripts = pre:extra_script.py
|
extra_scripts = pre:extra_script.py
|
||||||
|
|
||||||
[env:heltec_wifi_lora_32_V3_sailplane]
|
[env:heltec_wifi_lora_32_V3_sailplane]
|
||||||
extends = common
|
extends = common
|
||||||
board = heltec_wifi_lora_32_V3
|
board = heltec_wifi_lora_32_V3
|
||||||
lib_deps = ${common.lib_deps}
|
lib_deps =
|
||||||
|
${common.lib_deps}
|
||||||
bolderflight/Bolder Flight Systems MS4525@^1.1.3
|
bolderflight/Bolder Flight Systems MS4525@^1.1.3
|
||||||
bolderflight/Bolder Flight Systems Unit Conversions@^5.0.0
|
bolderflight/Bolder Flight Systems Unit Conversions@^5.0.0
|
||||||
bolderflight/Bolder Flight Systems Airdata Calculations@^4.0.0
|
bolderflight/Bolder Flight Systems Airdata Calculations@^4.0.0
|
||||||
adafruit/Adafruit BMP085 Library @ ^1.2.4
|
adafruit/Adafruit BMP085 Library @ ^1.2.4
|
||||||
lib_ignore =
|
lib_ignore =
|
||||||
winde
|
winde
|
||||||
|
|
||||||
|
|
||||||
build_flags = ${common.build_flags}
|
build_flags = ${common.build_flags}
|
||||||
-D DEVICE_SAILPLANE
|
-D DEVICE_SAILPLANE
|
||||||
|
upload_port = COM8
|
||||||
|
monitor_port = COM8
|
||||||
[env:heltec_wifi_lora_32_V3_winde]
|
[env:heltec_wifi_lora_32_V3_winde]
|
||||||
extends = common
|
extends = common
|
||||||
board = heltec_wifi_lora_32_V3
|
board = heltec_wifi_lora_32_V3
|
||||||
lib_deps = ${common.lib_deps}
|
lib_deps =
|
||||||
|
${common.lib_deps}
|
||||||
adafruit/Adafruit NeoPixel@^1.15.2
|
adafruit/Adafruit NeoPixel@^1.15.2
|
||||||
madhephaestus/ESP32Servo@^3.0.9
|
madhephaestus/ESP32Servo@^3.0.9
|
||||||
|
lib_ignore =
|
||||||
lib_ignore =
|
|
||||||
sailplane
|
sailplane
|
||||||
build_flags = ${common.build_flags}
|
build_flags = ${common.build_flags}
|
||||||
-D DEVICE_WINDE
|
-D DEVICE_WINDE
|
||||||
|
upload_port = COM9
|
||||||
|
monitor_port = COM9
|
||||||
+60
-8
@@ -2,13 +2,14 @@
|
|||||||
#include <Arduino.h>
|
#include <Arduino.h>
|
||||||
#include <U8g2lib.h>
|
#include <U8g2lib.h>
|
||||||
#include <RadioLib.h>
|
#include <RadioLib.h>
|
||||||
|
#include <ArduinoJson.h>
|
||||||
#ifdef DEVICE_WINDE
|
#ifdef DEVICE_WINDE
|
||||||
#include <tacho.h>
|
#include <tacho.h>
|
||||||
#endif
|
#endif
|
||||||
|
|
||||||
#ifdef DEVICE_SAILPLANE
|
#ifdef DEVICE_SAILPLANE
|
||||||
#include <airspeed.h>
|
#include <airspeed.h>
|
||||||
|
JsonDocument sailplane_data;
|
||||||
#endif
|
#endif
|
||||||
|
|
||||||
SX1262 radio = new Module(LORA_NSS, LORA_DIO1, LORA_NRST, LORA_BUSY);
|
SX1262 radio = new Module(LORA_NSS, LORA_DIO1, LORA_NRST, LORA_BUSY);
|
||||||
@@ -89,6 +90,37 @@ void setup()
|
|||||||
u8g2.sendBuffer();
|
u8g2.sendBuffer();
|
||||||
}
|
}
|
||||||
|
|
||||||
|
void draw_rssi(int Rssi){
|
||||||
|
u8g2.drawFrame(102,8,4,3);
|
||||||
|
u8g2.drawFrame(107,6,4,5);
|
||||||
|
u8g2.drawFrame(112,4,4,7);
|
||||||
|
u8g2.drawFrame(117,2,4,9);
|
||||||
|
u8g2.drawFrame(122,0,4,11);
|
||||||
|
|
||||||
|
if ((Rssi > -120) && Rssi < 0 )
|
||||||
|
{
|
||||||
|
u8g2.drawBox(102,8,4,3);
|
||||||
|
}
|
||||||
|
|
||||||
|
if ((Rssi > -100) && Rssi < 0 )
|
||||||
|
{
|
||||||
|
u8g2.drawBox(107,6,4,5);
|
||||||
|
}
|
||||||
|
if ((Rssi > -85) && Rssi < 0 )
|
||||||
|
{
|
||||||
|
u8g2.drawBox(112,4,4,7);
|
||||||
|
}
|
||||||
|
if ((Rssi > -70) && Rssi < 0 )
|
||||||
|
{
|
||||||
|
u8g2.drawBox(117,2,4,9);
|
||||||
|
}
|
||||||
|
if ((Rssi > -55) && Rssi < 0 )
|
||||||
|
{
|
||||||
|
u8g2.drawBox(122,0,4,11);
|
||||||
|
}
|
||||||
|
|
||||||
|
|
||||||
|
}
|
||||||
void loop()
|
void loop()
|
||||||
{
|
{
|
||||||
#ifdef DEVICE_SAILPLANE
|
#ifdef DEVICE_SAILPLANE
|
||||||
@@ -102,8 +134,14 @@ void loop()
|
|||||||
u8g2.print(vel_kmh);
|
u8g2.print(vel_kmh);
|
||||||
u8g2.sendBuffer();
|
u8g2.sendBuffer();
|
||||||
if (vel_kmh > 30)
|
if (vel_kmh > 30)
|
||||||
{
|
{
|
||||||
String data = String(vel_kmh);
|
sailplane_data["from"]= "D-1234";
|
||||||
|
sailplane_data["telemetry"]["speed"]=vel_kmh;
|
||||||
|
sailplane_data["telemetry"]["min"]=70;
|
||||||
|
sailplane_data["telemetry"]["max"]=150;
|
||||||
|
String data;
|
||||||
|
serializeJson(sailplane_data,data);
|
||||||
|
//String data = String(vel_kmh);
|
||||||
int state = radio.transmit(data);
|
int state = radio.transmit(data);
|
||||||
if (state == RADIOLIB_ERR_NONE)
|
if (state == RADIOLIB_ERR_NONE)
|
||||||
{
|
{
|
||||||
@@ -157,6 +195,8 @@ void loop()
|
|||||||
// you can read received data as an Arduino String
|
// you can read received data as an Arduino String
|
||||||
String str;
|
String str;
|
||||||
int state = radio.readData(str);
|
int state = radio.readData(str);
|
||||||
|
JsonDocument received;
|
||||||
|
deserializeJson(received,str);
|
||||||
|
|
||||||
// you can also read received data as byte array
|
// you can also read received data as byte array
|
||||||
/*
|
/*
|
||||||
@@ -166,16 +206,28 @@ void loop()
|
|||||||
*/
|
*/
|
||||||
|
|
||||||
if (state == RADIOLIB_ERR_NONE)
|
if (state == RADIOLIB_ERR_NONE)
|
||||||
{
|
{
|
||||||
|
String data_from=received["from"];
|
||||||
|
int data_speed=received["telemetry"]["speed"];
|
||||||
|
int data_min=received["telemetry"]["min"];
|
||||||
|
int data_max=received["telemetry"]["max"];
|
||||||
// packet was successfully received
|
// packet was successfully received
|
||||||
u8g2.clearBuffer();
|
u8g2.clearBuffer();
|
||||||
u8g2.setFont(u8g2_font_logisoso42_tr);
|
u8g2.setFont(u8g2_font_ncenB10_tr);
|
||||||
u8g2.setCursor(0, 60);
|
u8g2.setCursor(0, 10);
|
||||||
u8g2.print(str);
|
u8g2.print(data_from);
|
||||||
|
u8g2.setCursor(0, 64);
|
||||||
|
u8g2.print(data_min);
|
||||||
|
u8g2.setCursor(64, 64);
|
||||||
|
u8g2.print(data_max);
|
||||||
|
u8g2.setFont(u8g2_font_logisoso32_tr);
|
||||||
|
u8g2.setCursor(0, 50);
|
||||||
|
u8g2.print(data_speed);
|
||||||
|
draw_rssi(radio.getRSSI());
|
||||||
u8g2.sendBuffer();
|
u8g2.sendBuffer();
|
||||||
Serial.println(str);
|
Serial.println(str);
|
||||||
int speed = str.toInt();
|
int speed = str.toInt();
|
||||||
set_tacho(speed, 70, 150);
|
set_tacho(data_speed, data_min, data_max);
|
||||||
}
|
}
|
||||||
}
|
}
|
||||||
#endif
|
#endif
|
||||||
|
|||||||
Reference in New Issue
Block a user