98 lines
2.7 KiB
Markdown
98 lines
2.7 KiB
Markdown
[](https://gitea.rabe11.de/FCS/Winden-Telemetry/releases)
|
|
|
|
# Winden-Telemetry
|
|
|
|
|
|
Übertragung der IAS des Segelflugzeuges an die Winde
|
|
|
|
### Hardware:
|
|
- [Heltec LoRa 32 (V3)](https://heltec.org/project/wifi-lora-32-v3/)
|
|
- SG90 Servo
|
|
- MS4525 differenz Drucksensor
|
|
- 12 LED Ring WS2812b 50mm
|
|
- BMP180 Temperatur und Luftdrucksensor
|
|
- DC-DC Step Down Wandler 3A MP1584
|
|
- Relais
|
|
|
|
### Features:
|
|
- [x] LORA zum Übertragen
|
|
- [x] Airspeed via differenz Drucksensor
|
|
- [ ] Webinterface
|
|
- [ ] min/max speed einstellbar
|
|
- [ ] Kennzeichen einstellbar
|
|
- [x] Analoge Anzeige in der Winde
|
|
- [x] Farbige LEDs für Limits
|
|
- [ ] Übertragungszeit Begrenzen
|
|
- [ ] Übertragungszeit einstellbar
|
|
- [ ] Übertragung Rundumleuchten Signal an Start
|
|
- [x] Luftdrucksensor für Höhe und Vario
|
|
|
|
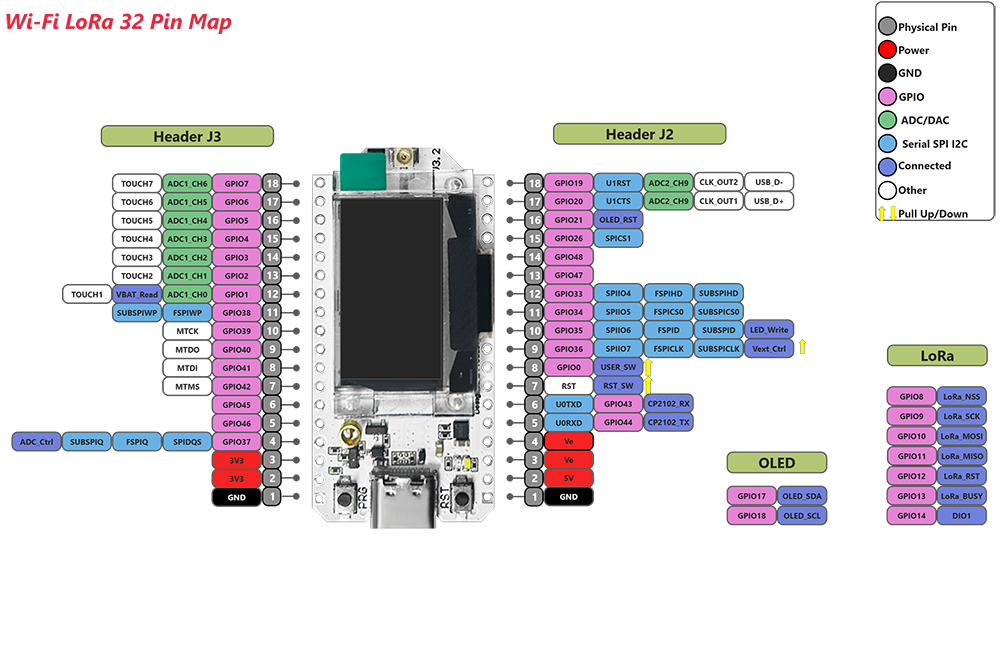
## Aufbau
|
|
|
|
Pin Layout Heltec WiFi LoRa (v3)
|
|
|
|
|
|
|
|
|
|
### Anschlusszuordnung
|
|
| Heltec WiFi LoRa (v3) Pin | MP1584 |SG90 Pin | BMP180 Pin | MS4525 Pin | LED Ring Pin |
|
|
| --- | --- | --- | --- | --- | --- |
|
|
| GND | OUT -| GND | GND | GND | GND |
|
|
| 3.3 V| | | VCC | VCC | VCC |
|
|
| GPIO 6| | | | | IN |
|
|
| GPIO 7| | 1 PWM (Orange)| | |
|
|
| GPIO19| | | SDA| SDA |
|
|
| GPIO20| | | SCL| SCL|
|
|
| 5V | OUT + | VCC | | |
|
|
|
|
|
|
|
|
## PCB
|
|
Die Platine ist so gestaltet das sie Induvidul bestückt werden kann, je nach Verwendung
|
|
|
|

|
|
|
|

|
|
|
|
[Schaltplan](img/Winden_Telemetry_Schematic.pdf)
|
|
|
|
| Bauteil | Modul Segelflugzeug | Modul Winde | Modul SKP |
|
|
| --- |--- |--- |--- |
|
|
| J1 | x | x | x | optional|
|
|
| A1 | x | x | x | optional|
|
|
| I2C_1 | MS4525 | optional| optional|
|
|
| I2C_2 | BMP180 | optional| optional|
|
|
| I2C_3 | optional| optional| optional|
|
|
| I2C_4 | optional| optional| optional|
|
|
| GPIO3 | optional| optional| optional|
|
|
| GPIO4 | optional| optional| optional|
|
|
| GPIO5 | optional| Eingang Warnleuchte |optional|
|
|
| GPIO6 | optional| LED Ring | optional|
|
|
| GPIO7 | optional| Servo | für Relais|
|
|
|
|
|
|
|
|
## Programmablauf Segelflugzeug
|
|
|
|
```mermaid
|
|
flowchart TD
|
|
A(["Start"])
|
|
A --> B{"ist Senden an?"}
|
|
B --> | Ja | C{"Sende Timer <90 sec"}
|
|
B --> | Nein | E{"low speed timer <90 sec"}
|
|
|
|
C --> | Ja | D["Sende Speed"]
|
|
C --> | Nein | F["Sende Schleppen komplett"] -->G["Starte Low Speed Timer"]
|
|
|
|
D --> Z["Warte 1 Sekunde"]
|
|
G ----> H["Senden aus"] -->Z
|
|
|
|
Z --> B
|
|
|
|
E --> | nein | I{"Speed < 30 km/h"}
|
|
I --> | nein |J["Senden an"] --> D
|
|
I --> | ja|Z
|
|
E --> | ja|Z
|
|
|
|
|
|
``` |